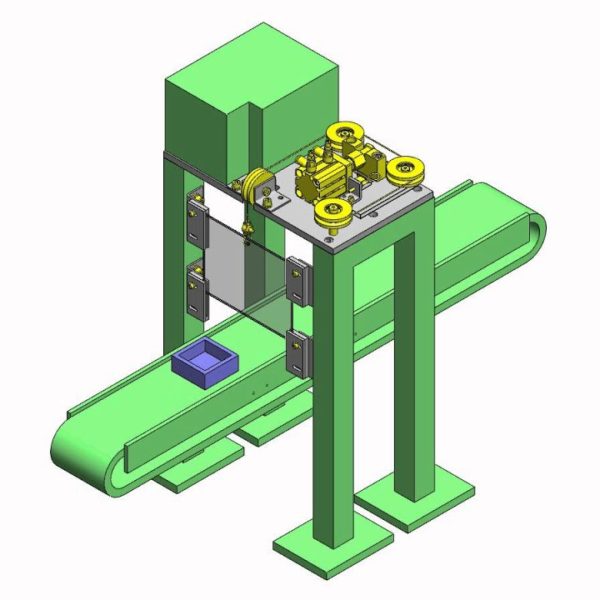
スプリングチャック機構【水平搬送/供給/排出/クランプ/チャック/洗浄/乾燥/段取り/直動機構/直動による揺動機構/シリンダ/リンク/ カム/カムフォロア/ばね/リニアブッシュ/筐体/チャンバ/からくり】 → http://jp.misumi-ec.com/ec/incadlibrary/detail/000390.html?cid=cid_jp_m_mech_20160318_8271_000390_2
その他のユニット事例はコチラ → http://jp.misumi-ec.com/ec/incadlibrary/?cid=cid_jp_m_mech_20160318_8271_000390_2
—–
仕様
目的・動作
他ユニットからのワークをスプリング力のみで自動的にチャックする機構
他ユニットへのアンチャックは外部よりシリンダでレバーを押す機構
環境・操作性
製造ラインでの、自動ワーク投入・排出
自動化する事により、作業者によりワークを水使用環境へ投入、排出する作業が不要になる為に作業効率改善
チャック先端ツメを変更することにより、ワーク段取換え可能
対象ワーク
スチールプレート:L220×W38×t1.5[mm]
重量:150[g]
特徴
動作仕様・寸法
チャック部、W241×D114×H232[mm]
外形寸法:W1005×D240×H544[mm]
必要精度・荷重
ばねによるチャックの為、ワークの重さには制限がある(現在のワークの重さ:150[g])
単軸ロボット精度:繰返し位置決め精度±0.01、最大速度600[mm/sec]、最大可搬質量55[kg]
主要部品の選定根拠
ばね及びシリンダ
ワークを固定する為のばね力及び解除するシリンダ力の選定
単軸ロボット
ロボットに搭載する重量の選定
設計ポイント
主要部品の計算工程
ばねによるワーク保持、チャック解除シリンダ容量、可搬荷重について妥当であることを検証する
ワーク重量:W=1.5[N](0.15Kg)、加減速を考慮し、判断荷重を2倍の3.0[N]とする
1)ワークを規制する際、水平方向に押す力 Fa
・引張りばね=AUU8-70(ミスミ)
ばね仕様
外径:8[mm]、線径:0.9[mm]、自由長さ:70[mm]、取付長さ:97.5[mm]、負荷時長さ:101.6[mm]、ばね定数:0.29[N・mm]、初張力3.92[N]
ばねによるモーメント M1=P1×X1=12×14=168[Nmm](17.1[kg・mm])
F1=M1/X2=168/39.5=4.25[N](0.43[kg])
ばね 2個なので Fa=4.25×2=8.5[N]
Fa=8.5[N]>3.0[N]なのでOK
2)チャック解除力 Fb
・チャック解除シリンダ力 (0.4[Mpa])(MSCFA16-10) F=80[N]
・チャックレバー比
支点からばねまでの距離 X1=14[mm]
支点からチャックまでの距離 X2=39.5[mm]
支点からシリンダで解除する位置 X3=16[mm]
ばねによるモーメント M2=P2×X1=13×14=182[N・mm](18.6Kg・mm)
F2=M2/X3=182/16=11.4[N](1.2Kg)
ばね 2個なので Fb=11.4×2=22.8[N]
Fb=22.8[N]<80[N]なので解除OK
3)単軸ロボットの選定
チャック部及びアーム部の重量 W=3.8[Kg],(37[N])
単軸ロボット(RSF410-C22A-C-3-450)
最大可搬質量(水平):55[kg]、(539[N])
許容オーバーハング量:壁面取付使用時
質量10[kg]の場合、A=193[mm]、B=132[mm]
∴ A1=193 > 114,B1=132> 35 OK
55[kg]>5.5[kg]なので OK
構造の作り込みと設計の勘所
水使用環境に対応する為、ワークチャック部には駆動力を持たせずばね力のみで保持する構造
構成部品はステンレスを多用している
チャックかアンチャックかは、センサにて検知し確認する
ロボット取付位置からチャック部までオーバーハング量があるので、ワーク投入・排出位置に上下方向の規制をしている
チャック部固定端は押しボルトと長穴により、その位置を微調整できる構造
アームには水使用環境へ投入時のさそい込み形状としている(板厚両側に角度面取)
技術計算リンク
単軸ロボット
検索コード:#UL390
—–
チャンネル登録はコチラ → https://www.youtube.com/channel/UC90Gu4PkO9dNs-pJ3HZzXwQ?sub_confirmation=1
使用部品はコチラ → http://jp.misumi-ec.com?cid=cid_jp_m_mech_20160318_8271_000390_2
MISUMI-VONA|ミスミの総合Webカタログ|FA・金型部品、工具・消耗品などの通販・検索サイト
ハッシュタグ #inCADLibrary #UL390
- 水切りブロー揺動機構【洗浄/乾燥/直動機構/回転による直動機構/シリンダ/リンク/リニアガイド/モータ/...
- スライド部カバー機構【水平搬送/供給/排出/位置決め/ステージ/切削/研磨/手動ワークセット/段取り/直動...