パレットストッパ&ロケート【コンベヤ/リフト/仕分け/分離/位置決め/段取り/直動機構/揺動機構/機構の安定化/シリンダ/リニアブッシュ】 → http://jp.misumi-ec.com/ec/incadlibrary/detail/000364.html?cid=cid_jp_m_mech_20160318_8271_000364_2
その他のユニット事例はコチラ → http://jp.misumi-ec.com/ec/incadlibrary/?cid=cid_jp_m_mech_20160318_8271_000364_2
—–
仕様
目的・動作
コンベヤを常時動かしながら
一時的にコンベヤからパレットを切り離し作業が可能
パレットはストッパシリンダのセンサで検知され、
上昇シリンダでロケートかつリフトする
リフト後はパレット上のワークをロボットが取りに来て
検査工程へと運ぶ
作業後パレット上に戻ってくると、ストッパ解除で搬送される
後続パレットはセンサ付のストッパシリンダにてエスケープされている
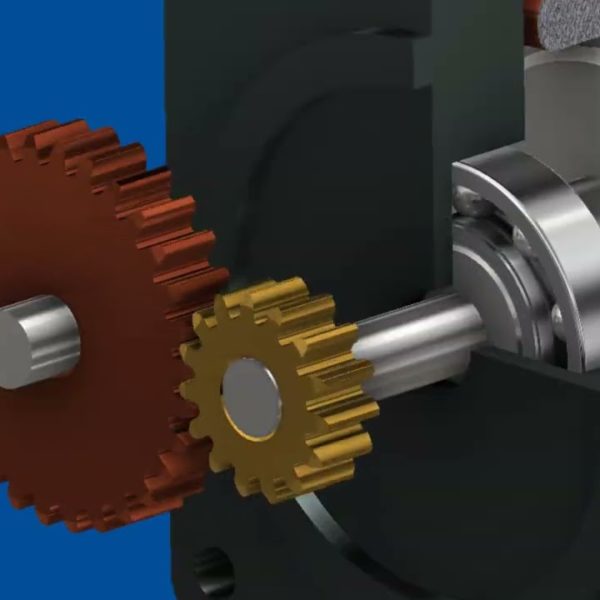
コンベヤチェーンはローラ付アタッチメントで常時動いており、
ワークがストップされている時はローラが回っているいる状態
環境・操作性
フリーフローラインでパレットを一時停止するアプリケーションに適用
対象ワーク
パレット
外形:W180×D120×H15[mm]
質量:0.9[kg]
特徴
動作仕様・寸法
上下シリンダストローク:20[mm]
ストッパシリンダストローク:15[mm]
外形寸法:W310×D130×H144[mm]
必要精度・荷重
上下シリンダが押し上げる全荷重:25[N](上昇部品重量+パレット、ワーク重量)
主要部品の選定根拠
シリンダ
荷重25[N]を持ち上げる事が出来るシリンダを選定
ワークの在荷を確認することができるセンサ(間接的にみる)
設計ポイント
主要部品の計算工程
ワークをロケート、リフトするシリンダとして妥当か、検証する
シリンダ推力 = 負荷率 x 使用圧力 x チューブ内径断面積
= 0.5 x 0.4[MPa] x π/4 x 25²[mm²]
= 98.2[N]>25[N]
妥当と判断する
構造の作り込みと設計の勘所
パレットリフト完了直前にショックアブソーバが作用するように配置し、リフト時の衝撃を緩和する構造
検索コード:#UL364
—–
チャンネル登録はコチラ → https://www.youtube.com/channel/UC90Gu4PkO9dNs-pJ3HZzXwQ?sub_confirmation=1
使用部品はコチラ → http://jp.misumi-ec.com?cid=cid_jp_m_mech_20160318_8271_000364_2
MISUMI-VONA|ミスミの総合Webカタログ|FA・金型部品、工具・消耗品などの通販・検索サイト
ハッシュタグ #inCADLibrary #UL364