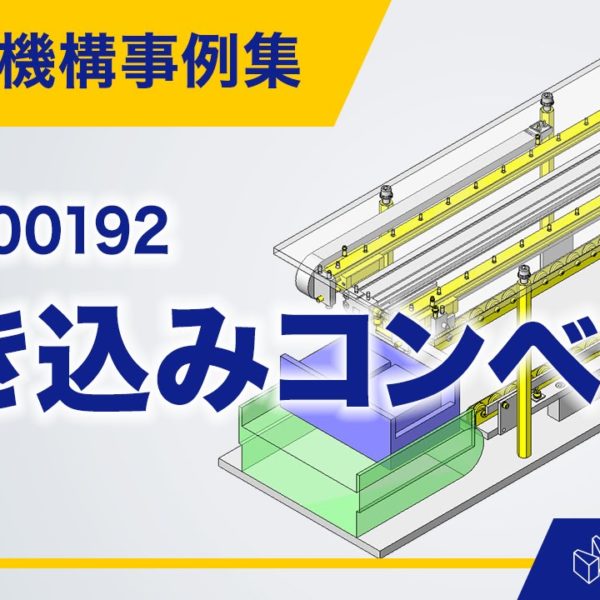
モータとラックアンドピニオンによるセンタリング機構【コンベヤ/整列/揺動による直動機構/リニアガイド/歯車/モータ/ベアリング/からくり】 → http://jp.misumi-ec.com/ec/incadlibrary/detail/000587.html?cid=cid_jp_m_mech_20160318_8271_000587_2
その他のユニット事例はコチラ → http://jp.misumi-ec.com/ec/incadlibrary/?cid=cid_jp_m_mech_20160318_8271_000587_2
—–
仕様
目的・動作
目的
ワークをセンタリングする
動作
①各コンベヤによってワークが搬送されてくる
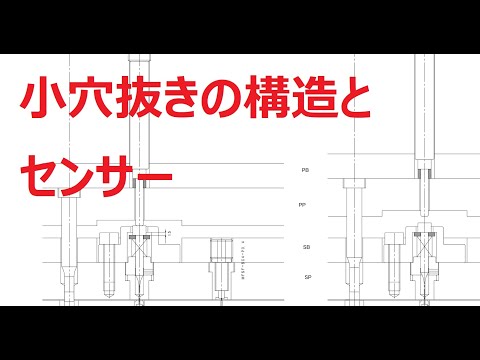
②所定位置にくればセンサによりワークが停止
③ラックに駆動が伝わりワークをセンタリング
④モータが逆回転しワークをリリース
⑤ワークが搬送される
対象ワーク
樹脂ボックス
外形寸法:W120×D105×H50[mm]
質量:1[kg]
特徴
動作仕様・寸法
外形寸法:W330×D200×H320[mm]
アームストローク:30[mm]
必要精度・荷重
モータの想定負荷トルク:2.5×10⁻²[N・m]
主要部品の選定根拠
モータ
ワークセンタリングに必要となる負荷トルクの計算
設計ポイント
主要部品の計算工程
負荷トルクを検証する
コンベヤと樹脂ボックスとの摩擦係数:μ=0.1、ワーク質量:M=1[kg]、
平歯車PCD:D=50[mm]、重力加速度:g=9.8[m/s² ]とすれば、
外力F[N]はF=μMgより、
F=0.1×1×9.8=0.98[N]
この外力によって作用するモータの負荷トルクTw[N・m]はTw=F・D/2×10⁻³より、
Tw=0.98×50/2×10⁻³=2.5×10⁻²[N・m]
出力6[W]のモータ(ミスミ型式:PACMB60-W6-V100)、減速比:i=1/150のギヤヘッド(ミスミ型式:PACMGX60-150)を選定する
モータの定格トルク:Tm=0.035[N・m]
減速機出力理論トルク:Tgm=Tm/i=0.035×150=5.25[N・m]
減速機許容トルク:Tg=2.45[N・m]
従って、
Tgm=5.25[N・m]>Tg=2.45[N・m]>Tw=2.5×10⁻² [N・m]
となり、選定したモータと減速機は満足する
構造の作り込みと設計の勘所
モータとラックアンドピニオンによりワークのセンタリング位置の調整が可能
また、センタリング位置の調整には余裕があることからサイズの異なるワークにも対応可能
技術計算リンク
小形ギヤードモータ概要
検索コード:#UL587
—–
チャンネル登録はコチラ → https://www.youtube.com/channel/UC90Gu4PkO9dNs-pJ3HZzXwQ?sub_confirmation=1
使用部品はコチラ → http://jp.misumi-ec.com?cid=cid_jp_m_mech_20160318_8271_000587_2
MISUMI-VONA|ミスミの総合Webカタログ|FA・金型部品、工具・消耗品などの通販・検索サイト
ハッシュタグ #inCADLibrary #UL587
- 開閉ワーク振り分け機構【コンベヤ/仕分け/分離/直動による揺動機構/回転による直動機構/シリンダ/リン...
- 位置決め機能付きチャック機構【コンベヤ/位置決め/クランプ/チャック/動機構/シリンダ/ばね/リニアブッ...