Creo Parametric の Mechanism Design Extension 機能を使用して、動くアセンブリモデルを作成し、動かしながらの部品間の干渉チェックを行います。
【書き起こし】【アシストエンジニア】メカニズムデザイン(機構解析)
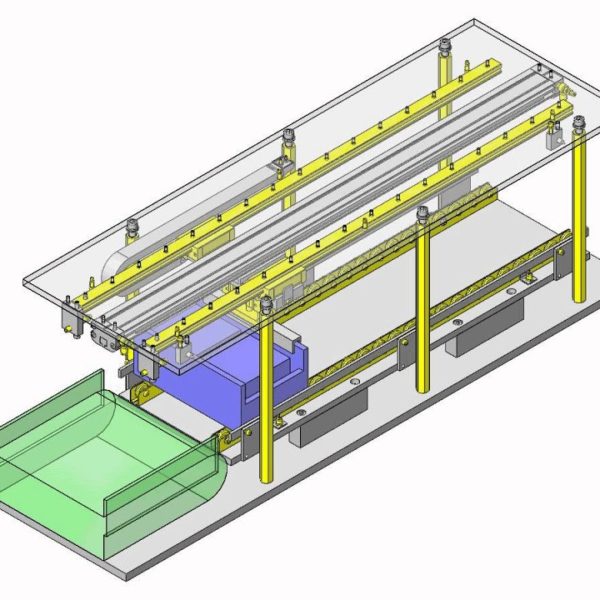
(00:02) みなさんこんにちはあしすチャンネルへようこそ 足とエンジニアな上指定の式です アシストインティはは ptc 車パートナー企業です 日頃は ptc 製品を5月いただき誠にありがとうございます アッシュとチャンネルでは ptc 製品に関するお役に立つ情報をご提供させて いただいております はい今回はクリアパラメトリックに島人機能である3ヶ月6デザイン s ペンション を使用して動かせんぷりんモデルを作成するところをご紹介させていただきます 題材はこのような緑のアームを回転させると 肩の部分がスライドする気ポーのモデルです ご紹介の流れですがまず最初にピッチ高速からメカニズム欠乏に変換する方法を説明 致します 次にサーボモーターを定義してキネマて抱え席を実行し動きをアニメーション表示し ます その後動かしながらの部品館での鑑賞テックを行います 最後に干渉部分の寸法を修正して再と鑑賞していないか確認を行っていきます
(01:15) では始めていきましょう 多くの場合にプリンくんつける際には一致高速を称してアセンブリーモデルを作成され ているかと思いますがこれでは無編が完成に拘束されてしまい モデルを動かすことができません [音楽] ん そこで動きを再現するために一致高速の代わりとしてピン スライダー院中等の目気に鮮血道を使用します これは部品を組み付ける際に移転しますが今回はすでに1高速で組み付けられたモデル を使用して ベンズ穴道に変換することにより動くアセンブリーモデルに精子治す方法を紹介いたし ます [音楽] まず操作をはペレスするためを出るツリーで緑のバーをアーム市の下まで動かし アーム1億見つけた状態まで戻します 次にアーム1を選択し定義を編集を十方します [音楽] ハイツタブをクリックすると2つの一で拘束されていることが分かります またステータスでは推定きゅーんチェックマークが付い通り
(02:25) 安全高速になっているためメカニズム穴通り賓館辛いコンガー プレイヤー置き去る通りリップできないようになっています ここでの推定軽四のチェックマークを外すことで部分的に高速になり ねカニ寸結合に印鑑するアイコンがプリックできるようになります ではこのアイコンをクリックします w 術とピッチ高卒が貧血号に自動的に変換されました ok をクリックし構成部品をドラッグを使用して動くか確認してみましょう [音楽] パーミッチが回転するようになりました 次にモデルツリーで緑のバーを一つ目のアーム兄の下まで動かし アームにをくっつけた状態まで戻します ここでサイドアームのビッグ動きを確認してみましょう 緑と黄色のアームが一体となって回転していることが分かります [音楽]
(03:32) アームにを選択し定義音韻史を実行します 配置などをクリックするとこれも2つの一致で拘束されていることが分かります ついてー経路のチェックマークを外しメカニズム鉄道に変換するアイコンをクリックし ます ok をクリックし構成部品をドラッグを使用する動きが確認してみましょうパームに が回転するようになりました てい ん さらにモデル次いで緑のバーを2つ目のアーム3の下まで動かし 二つ目のアームに置く見つけた状態のでもとして先ほどと同様に操作します [音楽] ん ん [音楽] me 構成部品をドラッグを使用して動くか確認してみましょう こちらもぱ移転することが確認できました [音楽] 最後にモデルプリーで緑の葉を打ちば下まで動かし最終の状態まで戻します [音楽] グライダーを選択し定義を編集を実行します
(04:37) [音楽] 大地タブをクリックして同様に水定休ようにチェックまあ今 c メカニズム結合に 変換するアイコンをクリックします [音楽] すると一致法則が平面欠乏と円柱結合に自動的に油断されました この平面結合では緑色に配列されたデイ探偵免状を自由に動いてしまうので削除します もう一つの円柱結合は問題ないぬそのまま残します 削除した平面結合の代わりの新規セットえっサイダー結合を追加します ええええええ 同じ位置にデータ6地区とデータム平民があるのでこれらをしをします ok をクリックし構成部品をドラッグを使用して動くか確認してみましょう [音楽]
(05:44) ん dee me もう片方のアームが接続されていないのでサイトスライダーを選択する定義を編集を 実行します ん dee 配置タブをクリックして新規セットとして 淫蟲結合を追加します アームとスライダーの印中免を選択します [音楽] 再度 ok をクリックし構成部品をドラッグを称して動く確認してみましょう ん [音楽] 今度は大丈夫そうですね これで破線 bully モデルがいいとするように動くようになりました [音楽] せっかくなんでメカニズムモードに入ってサーボモーターを定義し 動かしてみましょうメカニズムモードに入ると乱れず不潔動画アイコンで表示されます メニュー挿入グループにあるサーボモーターを選択します
(06:50) 参照としてピン結合の回転軸を選択します プロファイル詳細タープをクリックしてたくソフトを選択し 兵数として36を入力します [音楽] ん メニュー大好きグループにあるメカニズム解析を選択します タイプをキネマティックピンして実行をクリックします [音楽] メニュー大石グループにあるプレイバッグを選択します [音楽] 動きをアニメーションで表示することができます [音楽] ていた [音楽] ん また動かしながら部品間の干渉チェックも実施することができます 単勝検知設定をクリックしてグローバルな干渉県庁を選択しますフィクションで館主張 する場合に警告を鳴らすことも出来ますが今回を外して ok をクリックします [音楽]
(07:52) ん true の 鑑賞している箇所は赤色でハイライトされます voodoo ん [音楽] ええええええ ん th ん ムーディーん 一旦標準モードに戻り干渉しないように レースの切り欠き寸法を均衡します [音楽] deff 再度右手にずモードに入り解析を実行します
(09:06) me [音楽] ん の ん [音楽] me me ん dee ん 今度は干渉していないことがわかります [音楽] このようにクリオパラメトリックの標準機能である メカニズムでんエクステンションを使用して僕アセンブリーモデルを作成するところと 動かしながら部品間の干渉てっこ 実施するところをご紹介させていただきました [音楽] シットインフィアではこれからも皆様のお役に立つ情報を youtube で配信し ていきたいとおもいます もしよろしければこのアシストチャンネルを是非登録していただきご覧になって
(10:13) いただければ幸いです またこんな機能教えてほしいといったリクエストがございましたらコメント欄にご記入 をお願い致します 最後までご視聴いただきありがとうございました