省スペースワーク反転機構【コンベヤ/回転機構/モータ/ベアリング】 → http://jp.misumi-ec.com/ec/incadlibrary/detail/000331.html?cid=cid_jp_m_mech_20160318_8271_000331_2
その他のユニット事例はコチラ → http://jp.misumi-ec.com/ec/incadlibrary/?cid=cid_jp_m_mech_20160318_8271_000331_2
—–
仕様
目的・動作
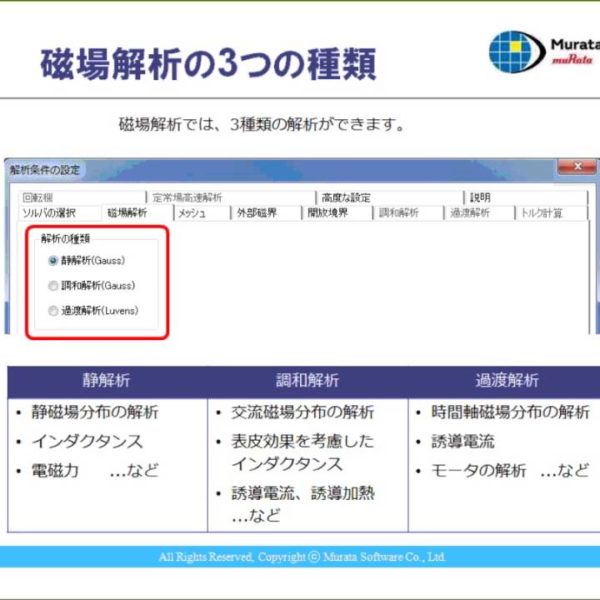
省スペースでワークの搬送方向を反転させる機構
センサによるワーク感知で回転開始、反転後ワーク排出センサ感知後に待機位置へハンドが戻る
上流にあるエスケープにより1個ずつ切り出されたワークを反転する
環境・操作性
ステッピングモータで回転開始、待機位置で待機を行う自動機構
低速及び1個処理の為、高サイクルタイムの処理には不向き
側面にバーコードなどがあり、読取りステーションの設置位置等のため流動方向を変えたくない場合に適用
対象ワーク
ワーク:紙箱
外形:W50× D50×H50[mm]
質量:6[N]
特徴
動作仕様・寸法
外形:W331×D344×H368[mm]
回転速度:1.5秒/180°(参考)
必要精度・荷重
モータの許容トルク:2.4[N・m]以上
モータ分解能:0.036[°/パルス]
主要部品の選定根拠
モータ
許容トルク2.4[N・m]以上のモータを選定
位置・速度制御のできるステッピングモータを選定
設計ポイント
主要部品の計算工程
モータのトルクがワークを反転する駆動として妥当か、検証する
ワーク重量:6[N]
距離:0.1012[m]
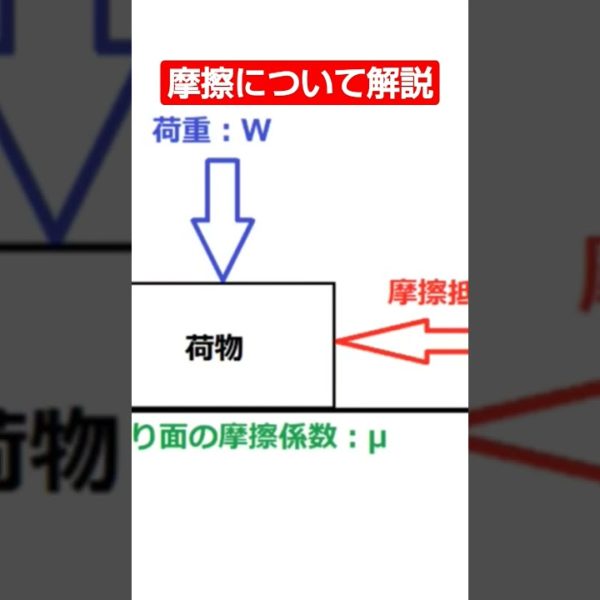
コンベヤの摩擦係数 = 0.4
安全率 = 10と仮定
負荷トルク = ワーク重量×距離×コンベヤの摩擦係数×安全率
= 6×0.1012×0.4×10 = 2.4[N・m]
モータの許容トルク:9[N・m]のステッピングモータを選定しており条件を満たす
構造の作り込みと設計の勘所
センサによるワーク感知で回転開始、反転後待機位置で停止
比較的低速での回転のため遠心力による影響は少ないが、アームの外側張出しは大きめに設計
検索コード:#UL331
—–
チャンネル登録はコチラ → https://www.youtube.com/channel/UC90Gu4PkO9dNs-pJ3HZzXwQ?sub_confirmation=1
使用部品はコチラ → http://jp.misumi-ec.com?cid=cid_jp_m_mech_20160318_8271_000331_2
MISUMI-VONA|ミスミの総合Webカタログ|FA・金型部品、工具・消耗品などの通販・検索サイト
ハッシュタグ #inCADLibrary #UL331